Dieses Praktikumsprotokoll entstand während meines Physikstudiums im Rahmen des Moduls C-Praktikum. Es wurde von meinem Praktikumspartner und mir erstellt, wobei mein Kommilitone nicht namentlich genannt werden möchte. Das Protokoll wurde zwar testiert, es können sich allerdings dennoch inhaltliche oder grammatikalische Fehler darin befinden. Sollte jemand solche Fehler finden, wäre ich froh wenn er sie mir mitteilt.
Fourierspektrum
Inhaltsverzeichnis
2. Durchführung und Auswertung
2.1. Frequenzspektren verschiedener Klangquellen
2.2. Bestimmung der Breite der Grundfrequenz
2.4. Bestimmung der Pendelgeschwindigkeit
Abbildung 1: Metallrohr 20 cm
Abbildung 2: Händeklatschen
Abbildung 3: Fingerschnippsen
Abbildung 4: Spektrum mit Rate=5K und Points=2048
Abbildung 5: Pendelspektrum
Tabelle 2: Unschärfebestimmung
Tabelle 3: Maximale Geschwindigkeit über Auslenkung und Schwingungsdauer, sowie Dopplereffekt
In diesem Versuch ist es das Ziel, sich näher mit Fourierspektrum und den damit verbundenen Begriffen, beispielsweiße Wellen, Schall, Akustik, Dopplereffekt, Unschärferelation und der harmonischen Analyse, auseinander zusetzen.
Eine Welle ist einfach ausgedrückt, die periodische Ausbreitung einer Schwingung in Raum und Zeit, während die Schwingung selbst nur eine periodische Bewegung eines Körpers um seine eigene Ruhelage ist. Wenn man bei einer Welle allerdings nur einen einzelnen, bestimmten Punkt betrachtet, dann sieht dieser wie eine Schwingung aus. Des Weiteren teilt sich die Welle in zwei unterschiedliche Wellenarten auf. Einmal gibt es die transversale Welle, auch Quer- oder Schubwelle genannt, bei der die Ausbreitung senkrecht zur Schwingung erfolgt. Beispiele dafür wären die Welle entlang eines Seiles oder Licht in einem Vakuum. Die andere Wellenart ist die longitudinale Welle, auch Längswelle genannt, bei der die Ausbreitungsrichtung der Schwingungsrichtung entspricht. Sowas geschieht beispielsweise bei Schallwellen in Gasen oder Flüssigkeiten und benötigt also, anders als elektromagnetische Wellen, ein Trägermedium. Mathematisch kann man diese Wellen mit der Wellengleichung erklären:
(1.2.1)
Wobei die Kompressibilität und der Druck p definiert sind durch:
(1.2.2)
(1.2.3)
Dabei ist t die Zeit, das Volumen, R die universelle Gaskonstante, m die Gasmasse, M die Molmassen und p der Druck. Aus Gleichung (1.2.1) folgt dann, das c² gleich:
(1.2.4)
ist. Durch die Lösung der Wellengleichung bekommt man dann die folgende Wellenfunktion:
(1.2.5)
dabei steht für die Auslenkung des Teilchens aus der Ruhelage, für die Amplitude, die Kreisfrequenz, k für die Wellenzahl, x für den Ortsvektor und t für die Zeit. Möchte man nun, beispielsweise wie in diesem Versuch, die Maximalgeschwindigkeit eines Pendels berechnen, verwendet man die Schwingungsgleichung:
(1.2.6)
bei der A für die Amplitude, für die Winkelgeschwindigkeit und für die Phase steht. Die Winkelgeschwindigkeit lässt sich dabei berechnen mittels der Formel:
(1.2.7)
wobei T die Schwingungsdauer darstellt. Setzt man die Gleichung (1.2.7) nun in (1.2.6) ein und leitet sie ab, so erhält man:
(1.2.8)
woraus sich die maximale Geschwindigkeit, welche das Pendel erreichen kann, errechnen lässt. Dazu muss man nur den Cosinus seinen Maximalwert einsetzen, also eins, und erhält so die Formel:
(1.2.9)
Des Weiteren existieren bei Wellen auch so genannte Wellenbäuche und Knoten. Ein Bauch entsteht genau da, wo sich bei einer stehenden Welle die maximale Amplitude befindet. Die Bäuche haben dabei einen Abstand von einer halben Wellenlänge und zwischen ihnen befindet sich immer ein Knoten. Diese Knoten sind, bei einer ebenen Welle, immer da, wo sich die minimale Amplitude einer Welle befindet. In einer zweidimensionalen Umgebung sind es Knotenlinien und in einer dreidimensionalen Knotenebenen. Außerdem verfügen Wellen auch über die Eigenschaft sich, aufgrund des Superpositionsprinzips, sich zu überlagern. Dies bedeutet, dass das aufeinander treffen mehrerer Wellen zur Bildung einer neuen Welle führt. Dabei entspricht deren Auslenkung einer Addition der Einzelauslenkungen der ursprünglichen Wellen. Sollte die Auslenkung der unterschiedlichen Wellen dabei identisch sein, so bildet sich dadurch eine stehende Welle, deren Auslenkung an bestimmten Stellen immer gleich Null ist. Dabei können sich die Wellen durch unterschiedliche Quellen oder durch das reflektieren einer Welle an einer Wand bilden. Die Gesamtlänge l der dadurch erzeugten Wellen lässt sich dabei mit der Gleichung:
(1.2.10)
berechnen, wobei der Wellenlänge entspricht. Die daraus resultierenden Eigenfrequenzen lassen sich dann mittels der Formel:
(1.2.11)
errechnen, wobei c für die Schallgeschwindigkeit, beziehungsweise Phasengeschwindigkeit, steht.
Geräusche oder Töne, welche ein Bestandteil der Akustik, die auch als Schalllehre bezeichnet wird, sind Sinusschwingungen und die jeweilige Frequenz eines Tones bestimmt die Tonhöhe. Wenn nun ein Grundton und dessen Obertöne überlagert werden, dann nennt man dies einen Klang, welcher zwar noch periodisch, aber nicht mehr sinusförmig ist. Berechnet werden können die daraus resultierenden Frequenzen mit der Gleichung:
(1.3.1)
Wenn die erzeugten Töne zusätzlich noch nicht periodischen Quellen entspringen, dann nennt man dies auch Rauschen. Trägt man nun die Amplituden aller am Ton beteiligten Teiltöne in Abhängigkeit zur Frequenz auf, dann erhält man das sogenannte Fourierspektrum. Weiterhin existiert die Schallintensität I, welche die Lautstärke eines Schallfeldes angibt, proportional zum Quadrat der Amplitude ist und mit der folgenden Formel berechnet werden kann:
(1.3.2)
wobei F der senkrecht zur Ausbreitungsrichtung liegenden Fläche und E der Energie des Schalls entspricht. Aufgrund des breiten Schallintensitätsspektrums, welches das menschliche Gehörsystem abdeckt, wird auch mit dem Pegelmaß gearbeitet, dass eine logarithmischen Skala verwendet. Berechnet wird es unter der Verwendung der Gleichung:
(1.3.3)
dabei steht dB für Dezibel, I für die zu messende Intensität und für die Bezugsintensität. Möchte man nun noch berücksichtigen, dass der Ton nur eine endliche Dauer hat und nicht eine unendliche, wie in Abbildung 2 zu sehen ist, so verändert sich seine Gestalt wie die in Abbildung 3. Dabei ist die Frequenzbereichverbreiterung abhängig von der Länge des Impulses T und lässt sich berechnen mit der Formel:
(1.3.4)
wobei für die auftretende Unsicherheit bei der Bestimmung der Frequenz steht. Daraus folgt dann auch direkt, dass die Frequenzmessung umso präziser wird, je länger der Messzeitraum ist. Allerdings würde es dadurch auch unmöglich werden, den genauen Zeitpunkt eines bestimmten Ereignisses zu bestimmen. Dieses Phänomen nennt man auch Unschärferelation und kann in diesem Kontext mittels der Gleichung:
(1.3.5)
erklärt werden, dabei steht für die Dauer des Signals.
Möchte man eine harmonische Analyse durchführen, bei der eine erzeugte Wellenform wieder in ihre einzelnen Bestandteile zerlegt wird, so verwendet man die sogenannte Fourier-Analyse. Diese nutzt die Tatsache aus, dass es Möglich ist eine periodische Funktion f(t) als die Summe von trigonometrischen Funktionen darzustellen, was zur folgenden Gleichung führt:
(1.4.1)
dabei stehen , und für die Fourier-Koeffizienten. Diese lassen sich auch mittels der Amplitude und der Phase ausdrücken, was zur folgenden Vereinfachung führt:
(1.4.2)
und dadurch würde sich, bei einer Überlagerung von zwei Wellen, folgende Formel ergeben:
(1.4.3)
Weiterhin verbindet die Fourier-Transformation das Frequenzspektrum, also die Signaldarstellung als Funktion der Frequenz, und die zeitlichen Abläufe, also die Signaldarstellung als Funktion der Zeit, miteinander. Bezieht man nun also die Euleresche Identität mit ein und tausche die Summe in Gleichung (1.4.1) durch ein Integral aus, so erhält man:
(1.4.4)
und
(1.4.5)
bei der der Fourier-Transformierten von entspricht.
Wenn sich ein Beobachter auf eine Signalquelle oder die Quelle auf einen Beobachter zubewegen, dann erhöht sich die Frequenz des Signals und bei einem wegbewegen voneinander, sinkt sie. Dieser Effekt wird als Dopplereffekt bezeichnet und ermöglich beispielsweiße die Bestimmung der maximalen Pendelgeschwindigkeit. Die Ursache für diesen Effekt ist die Veränderung der Entfernung zwischen Signalquelle und Beobachter und die damit verbundene Änderung der Wellenlängen, siehe dazu auch Abbildung . Bei dem hier vorliegenden Versuchsaufbau repräsentiert der Lautsprecher zunächst die Signalquelle und das Pendel den sich auf das Signal zubewegenden Beobachter. Nun kann man die dabei auftretende Pendelfrequenz berechnet mit der Gleichung:
(1.5.1)
dabei entspricht der Ursprungsfrequenz und v der Pendelgeschwindigkeit. Nach dem Auftreffen des Signals auf dem Pendel, wird es reflektiert und das Pendel repräsentiert nun die Quelle, was zu einer Änderung der ankommenden Frequenz, welche mittels der Formel (1.4.1) berechnet wurde, führt. Diese geänderte Frequenz kann nun mit einer leicht geändert Version der Gleichung (1.4.1) berechnet werden:
(1.5.2)
Außerdem gilt Näherungsweiße für die auftretende Frequenzverschiebung die Formel:
(1.5.3)
und weiterhin:
(1.5.4)
wobei für die einfache Frequenzänderung steht. Setzt man in diese Gleichung nun die Formeln (1.5.1) und (1.5.3) ein, so erhält man:
(1.5.5)
2. Durchführung und Auswertung
2.1. Frequenzspektren verschiedener Klangquellen
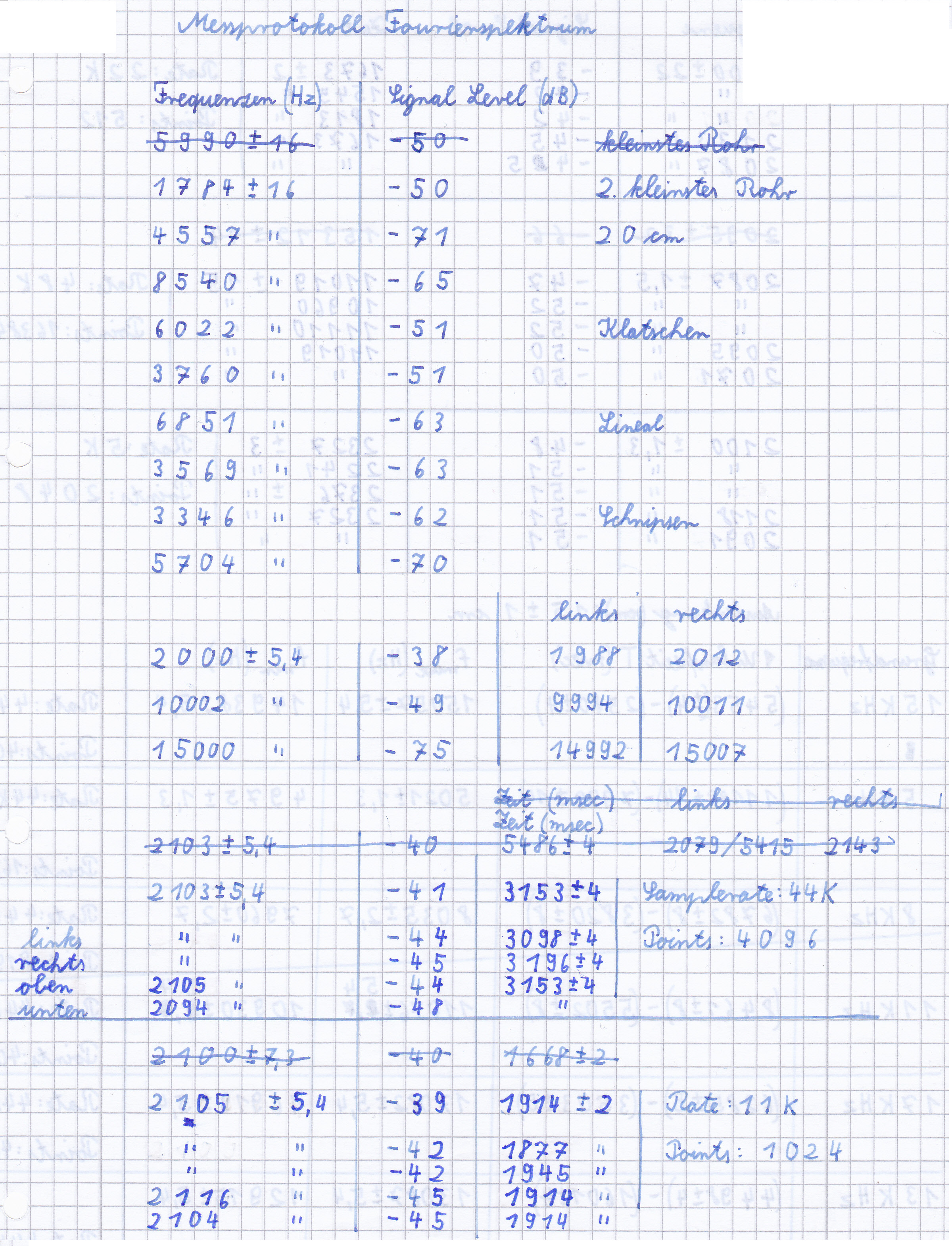
Im ersten Versuchsteil wurden mithilfe eines Mikrofons am Computer die Frequenzspektren verschiedener Klangquellen wie z.B. eines Metallrohrs oder des Händeklatschens gemessen. Die Einstellung des Programms „Gram6“ erfolgte genauso wie in der Versuchsanleitung beschrieben. In den folgenden Abbildungen ist die Intensität in dB auf der y-Achse über die Frequenz in Hz auf der x-Achse aufgetragen.
Wie in den Abbildungen zu erkennen ist stechen nur bei dem Metallrohr einzelne Peaks bei bestimmten Frequenzen heraus, während bei den anderen Klangquellen das Spektrum kontinuierlicher verläuft und Spitzen oft dicht nebeneinander liegen. Die deutlichen und vereinzelten Peaks beim Metallrohr lassen sich dadurch erklären, dass sich im Metallrohr stehende Wellen bilden, welche nur bei bestimmten Frequenzen möglich sind.
2.2. Bestimmung der Breite der Grundfrequenz
Im zweiten Versuchsteil wurde mithilfe des Frequenzgenerators und des Lautsprechers ein Ton erzeugt und wie im ersten Versuchsteil aufgenommen. Es wurde zuerst die maximale Intensität abgelesen und anhand dieser dann jeweils links und rechts der Maximalintensität die Frequenz bei halber Intensität abgelesen. Dies wurde für drei verschiede erzeugte Töne durchgeführt. Die Frequenzbreite wird nun folgendermaßen für den ersten Ton berechnet.
|
Halbwertsbreite in Hz |
|
|
2000 |
24 |
|
10000 |
17 |
|
15000 |
15 |
Tabelle 1: Halbwertsbreite
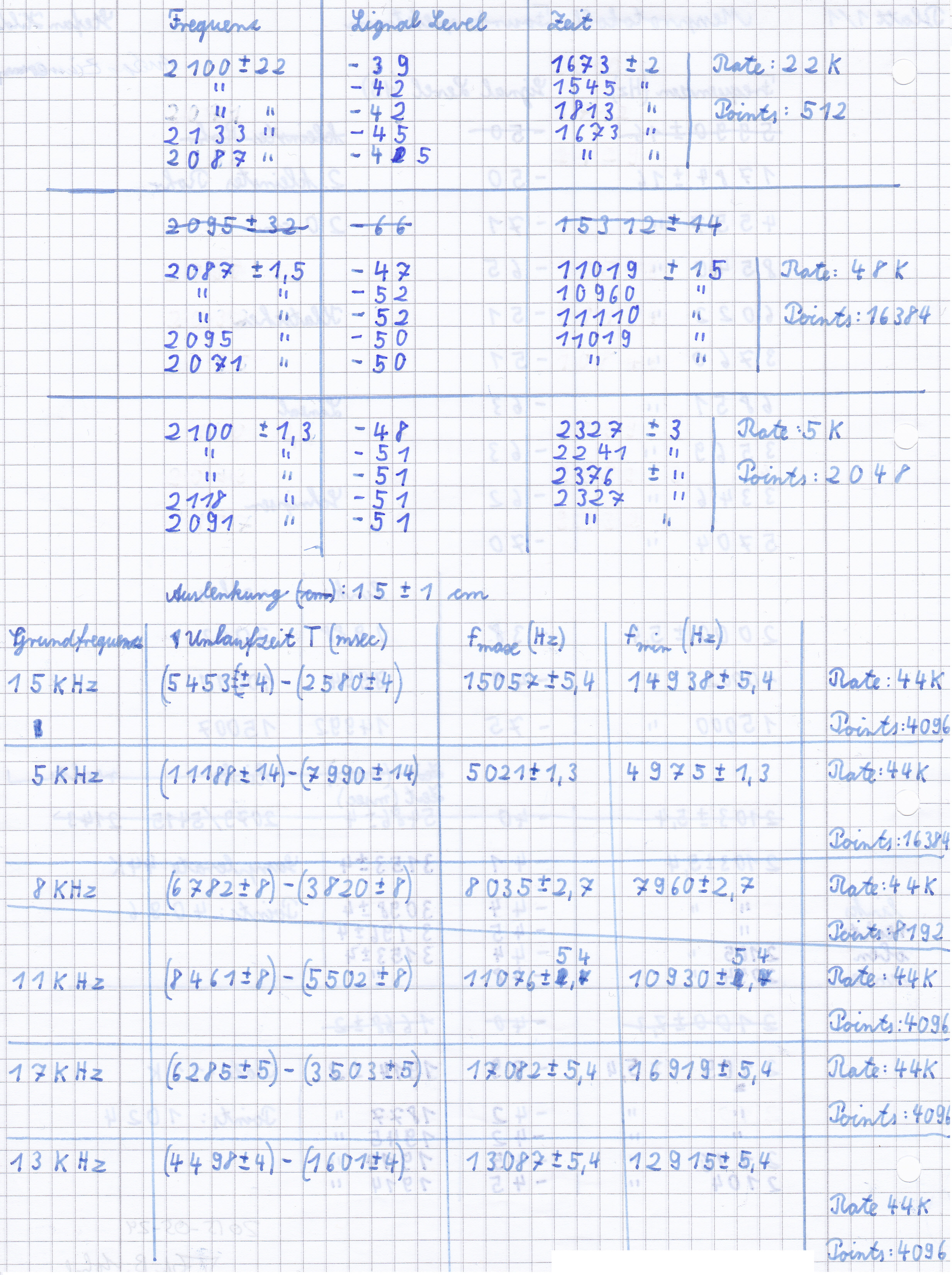
Im dritten Versuchsteil wurde mit dem Frequenzgenerator ein Ton erzeugt, der im Sekundentakt eine Rampe von 2,0 kHz bis 2,2 kHz fährt und ebenfalls wieder aufgenommen, wobei Frequenz und Zeit, sowie die Intensität als Falschfarbendarstellung aufgezeichnet wurden. Hier wurde auf einer Rampe die Maximalintensität gesucht und dann in beiden Richtungen die Frequenz bei halber Intensität, bzw. die Zeit bei halber Intensität abgelesen. Die halbe Intensität liegt 3 dB unter der Maximalintensität, allerdings war es je nach Einstellung nicht möglich einen Punkt zu finden der um exakt 3 dB kleiner war, in diesem Fall wurde der Punkt verwendet, welcher am nächsten an diesem lag. Dies wurde für fünf verschiede Einstellungen von Sample-Rate und Points durchgeführt. Die folgende Abbildung zeigt beispielhaft das Spektrum einer Messung.
Die Frequenzbreite wird genau wie in Abschnitt 2.2 berechnet und analog zur Frequenzbreite auch die Zeitbreite. Die Unschärfe U wird mit Formel (1.3.5) berechnet, wobei der Wert 1 nur theoretisch gilt. Die Berechnung der Unschärfe wird nur für die erste Messung gezeigt, für alle anderen Messungen erfolgt die Berechnung analog.
|
Points |
U |
|
|
44K |
4096 |
1,1 ± 1,1 |
|
11K |
1024 |
0,8 ± 0,8 |
|
22K |
512 |
12 ± 12 |
|
48K |
16384 |
3,6 ± 1,2 |
|
5K |
2048 |
3,6 ± 0,5 |
Tabelle 2: Unschärfebestimmung
Anschließend wird der Mittelwert von U gebildet zu und der Fehler ergibt sich aus der größten Differenz zwischen Mittelwert und Messwert, sowie dem größten Fehler von U, sodass sich ein Wert ergibt von:
2.4. Bestimmung der Pendelgeschwindigkeit
Im vierten Versuchsteil wurden Lautsprecher und Mikrofon senkrecht zu Pendelplatte aufgestellt. Mit dem Frequenzgenerator wurde nun ein Ton erzeugt und die Platte immer um ausgelenkt. Das über das Mikrofon aufgenommene Spektrum einer Messung ist in der folgenden Abbildung zu sehen.
Die maximale Geschwindigkeit des Pendels kann nun einerseits mit Formel (1.2.9) berechnet werden, wozu die Schwingungsdauer als Zeitdifferenz zwischen zwei Maximal der oben abgebildeten Wellenfunktion gemessen wird und andererseits kann die maximale Geschwindigkeit mit Formel (1.5.5) berechnet werden, wobei für die halbe Differenz zwischen größter und kleinster gemessener Frequenz, und verwendet wird. Beispielrechnung für die maximale Geschwindigkeit aus Schwingungsdauer und Auslenkung:
Beispielrechnung für die maximale Geschwindigkeit durch Dopplereffekt:
|
Auslenkung und Schwingungsdauer in |
Dopplereffekt
in |
|
|
15000 |
033 ± 0,02 |
0,68 ± 0,06 |
|
5000 |
0,29 ± 0,02 |
0,79 ± 0,04 |
|
8000 |
0,32 ± 0,02 |
0,81 ± 0,06 |
|
11000 |
0,32 ± 0,02 |
1,14 ± 0,08 |
|
17000 |
0,34 ± 0,02 |
0,82 ± 0,05 |
|
13000 |
0,33 ± 0,02 |
1,14 ± 0,07 |
Tabelle 3: Maximale Geschwindigkeit über Auslenkung und Schwingungsdauer, sowie Dopplereffekt
Der zu bestimmte Wert der Unschärfe widerspricht und Einbeziehung des Fehler zwar nicht dem theoretischen Wert von 1, aber der Fehler der Unschärfe ist im Vergleich zum Messwert sehr groß. Da der Wert 1 nur theoretisch unter idealen Bedingungen zu erreichen ist, war zu erwarten, dass der Wert größer ausfällt. Gründe für den großen Fehler sind unter anderem, dass Frequenzbreite und Zeitbreite nicht beliebig genau messbar sind, nicht immer Punkte mit halber Intensität, oder aber auch mehrere Punkte mit halber Intensität, aber verschiedenen Frequenzen, bzw. Zeiten zu finden waren. Besonders der Messwert mit nur 512 Points hat einen großen Anteil des Fehlers ausgemacht. Die aus der Auslenkung und Schwingungsdauer bestimmten maximalen Geschwindigkeiten stimmen auch unter Einbeziehung der Fehler nicht mit den durch den Dopplereffekt bestimmten maximalen Geschwindigkeiten überein. Mögliche Gründe dafür sind, dass in Abbildung 6 die Schwingungsdauer des Pendels nicht genau angelesen werden konnten und auch aufgrund des Versuchsaufbaus die Auslenkung des Pendels nicht sehr präzise gemessen werden konnte. Weiterhin schwanke die Pendelplatte während den Schwingungen ein wenig hin und her und der Lautsprecher und das Mikrofon konnten nicht beide exakt senkrecht zur Platte ausgerichtet werden.
In diesem Versuch wurde die mittlere Unschärfe auf verschiedenen Einstellungen bestimmt zu
sowie bei mehreren Frequenzen die maximale Geschwindigkeit des Pendels auf zwei unterschiedlichen Wegen bestimmt
|
Auslenkung und Schwingungsdauer in |
Dopplereffekt
in |
|
|
15000 |
033 ± 0,02 |
0,68 ± 0,06 |
|
5000 |
0,29 ± 0,02 |
0,79 ± 0,04 |
|
8000 |
0,32 ± 0,02 |
0,81 ± 0,06 |
|
11000 |
0,32 ± 0,02 |
1,14 ± 0,08 |
|
17000 |
0,34 ± 0,02 |
0,82 ± 0,05 |
|
13000 |
0,33 ± 0,02 |
1,14 ± 0,07 |
Tabelle 4: Zusammenfassung
- Demtröder, W. (2013). Experimentalphysik 1 - Mechanik und Wärme (6., neu bearbeitete und aktualisierte Ausg.). Springer-Verlag.
- Kuchling, H. (2014). Taschenbuch der Physik (21. Ausg.). München: Carl Hanser Verlag.
- Martin, A. P. (27. Mai 2015). LEIFIphysik. Abgerufen am 27. Mai 2015 von LEIFIphysik: http://www.leifiphysik.de/themenbereiche/mechanische-wellen/versuche
- Meschede, D. (2010). Gerthsen Physik (24. überarbeitete Ausg.). Springer-Verlag.
- Sengpielaudio. (kein Datum). Abgerufen am 19. September 2014 von Sengpielaudio: http://www.sengpielaudio.com/Rechner-schallgeschw.htm
- Tipler, P. A., & Mosca, G. (2009). Physik (6. Ausg.). Springer-Verlag.